
感知机
感知机
感知机的概念
感知机是一种线性分类模型,属于判别模型,其使用一个线性方程所对应的超平面,将特征空间分成两部分。
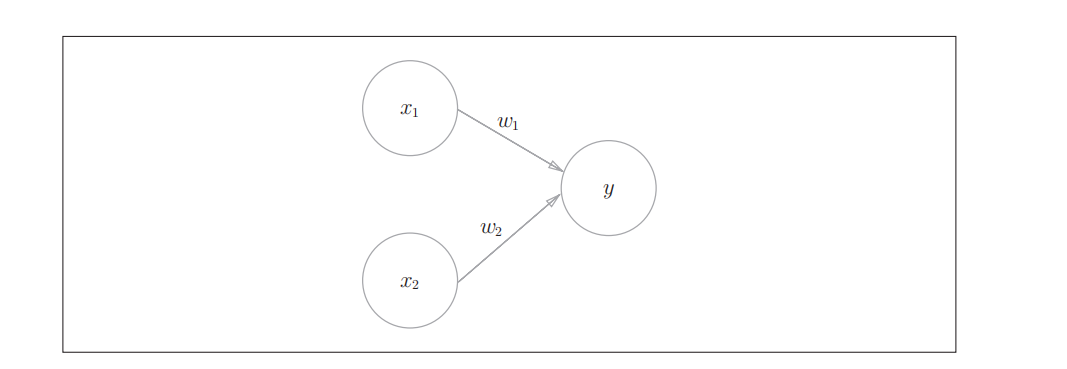
例:有两个输入的感知机:
x1、x2是输入信号,y是输出信号,w1、w2是权重。图中的○称为“神经元”或者“节点”。输入信号被送往神经元时,会被分别乘以固定的权重(w1x1、w2x2)。神经元会计算传送过来的信号的总和,当这个总和超过了某个界限值时,才会输出1,否则输出0(二分类)。这也称为“神经元被激活”。这里将这个界限值称为阈值,用符号θ表示。
用数学公式表示为:

注:感知机的多个输入信号都有各自固有的权重,权重越大,对应该权重的信号的重要性就越高
单层感知机的局限性:单层感知机的局限性就在于它只能表示由一条直线分割的空间。(单层感知机无法分离非线性空间)
多层感知机:多层感知机可以表示非线性空间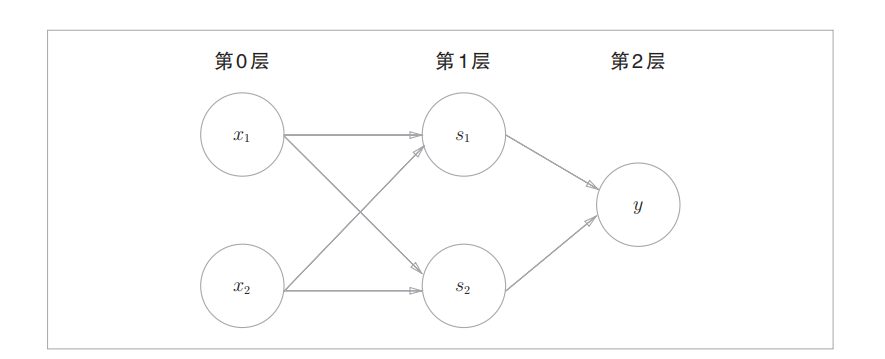
感知机的损失函数
感知机的损失函数:误分类点到超平面的距离,即$-{1 \over {||w||}}\sum \limits_{x_i\in M} y_i(w*x_i+b)$,其中M为误分类点的集合
注:对于误分类点,$y_i(wx_i+b)$<0
感知机学习算法的原始形式
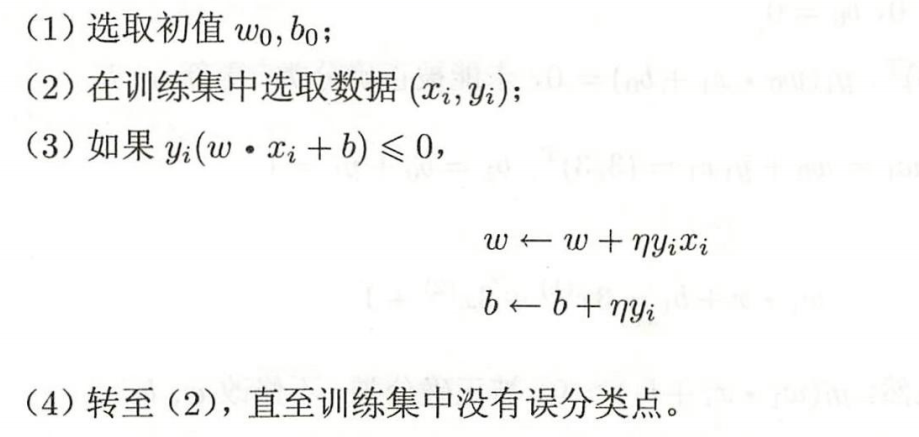
感知机学习算法是误分类驱动的,采用随机梯度下降法,不断地极小化目标函数。
训练过程:
注:
1.当一个实例点被误分类时,调整w,b,使分离超平面向误分类点的一侧移动,以减少误分类点距离超平面的距离。
2.其训练过程等价于使用批量大小为1的梯度下降,并使用L(y,x,w)=max(0,-y(w,x))的损失函数。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 丹青两幻!
相关推荐



评论
